AIS VERİLERİNİ VERİ MADENCİLİĞİ KULLANILARAK GEMİ TİPLERİNİN MANEVRA KABİLİYETLERİNE ETKİSİNİN ARAŞTIRILMASI
ÖZETÇE
Gemiler Uluslararası ticaretin önemli bir aracıdır. Ticaretin devamlılığı sağlanması için gemi trafiğinin denetlemesi
ve kararlı hale getirilmesi gereklidir. Gelişen teknoloji ile gemi trafikleri radar ve ais ile kolayca izlenebilmektedir.
Ancak izlenebili rlik çatışmaların önüne geçememektedir. Bu yüzden gemi manevralarının izlenmesi ve gemi tiplerine
göre analiz edilmesi gemi trafiğinin daha akılcı yönetilmesine olanak sağlayacağı görüşü benimsenmektedir. Gemi
manevralarını izlemek ve gemi tipleriyle arasındaki bağı kurabilmek için veri madenciliğinden yararlanılarak bir
analiz çalışması yapılmıştır.
1.GİRİŞ
Tanım; AIS gemi konuşlu bir transponder sistemi olup geminin kimlik bilgisini,mevkisini,hızını ve diğer verileri, yakınındaki gemi ve sahil istasyonuna VHF radyo üzerinden sürekli olarak yayınlar.
AIS verileri; 2009 - Haziran 2020 takvim yıllarına ait ABD kıyı suları için kayıtları içeren bir web sitesinden temin edilmiştir. Kayıtlar, Universal Transverse Mercator (UTM) bölgesi tarafından bir dakikaya kadar filtrelenir ve sıkıştırılmış, aylık dosyalar halinde kullanıma sunulmuştur. Ais verileri içerisinde geçen kısaltmalar;
MMSI: Bir Deniz Mobil Hizmet Kimliği, gemi istasyonlarını, gemi yer istasyonlarını, sahil istasyonlarını, sahil yer istasyonlarını ve grup çağrılarını benzersiz bir şekilde tanımlamak için bir radyo frekansı kanalı üzerinden dijital biçimde gönderilen dokuz basamaklı bir dizidir.
LAT: Latitude (Enlem)
LON: Longitude (Boylam)
SOG: (Speed of Ground): Yere göre hız. Karadan bakıldığında geminin görünen hızı.
COG: (Course Over Ground): Yere gore rota. Geminin yere göre gittiği yönü gösterir. Mesela, akıntı tekneyi geri geri iterse, yere göre yön, rotanın tersi olur.
Heading: Pruva veya rota. Geminin pruvasının baktığı yön. Akıntı vs sebebiyle gittiği yönden farklı olabilir.
IMO: (International Maritime Organization) Uluslararası Denizcilik Örgütü numarası gemiler, kayıtlı gemi sahipleri ve yönetim şirketleri için benzersiz bir tanımlayıcıdır.
CallSign: Çağrı işareti, radyo haberleşmesinde kullanılan kullanıcıyı tanıtan bir kod. VesselType:
- 60 Yolcu, bu tipteki tüm gemiler
- 70 Kargo, bu tipteki tüm gemiler
- 80 Tanker, bu türden tüm gemiler Status:
- 0 Motor gücü ile yürütülen tekne ( kısıtlama yok)
- 5 Demirde olan tekne Draft: Su çekimi.
Amaç; Veri madenciliği tekniklerini kullanarak gemi tiplerine göre gemi manevra karakteristiğini ortaya çıkarmaktır. Bu sayede kanal veya boğaz geçişlerinde manevra kabiliyetleri gemi tipleri ile önceden ön görülerek daha stabil bir trafik hattı oluşturulabilecektir. Kapsam; Aynı boyut ve karina yapısındaki gemilerin manevra kabiliyetlerine etki eden husular arasında gemi tiplerinin avantaj ve dezavantajlarının araştırılması.
Yöntem; Makalemizde yedi milyon satırlık veri seti python yazılım dilinin pandas kütüphanesi ile düzenlenmiş ve temizleme işlemlerinden geçmiştir. Veri setinde çıkan verileri görselleştirmek için matplotlib kütüphanesinden yararlanılmıştır. Gemilerin gittikleri yönlerin oranları ve gitmiş oldukları rota izleri bu sayede görselleştirilmiştir. Temizlenen ve kategorik şekilde ayrılan veri setleri tekrar birleştirilip eğitim ve test veri setleri oluşturulmuştur. Bu veri setleri çeşitli algoritmalarda test edilmiş ve en yüksek doğruluk payı sonucu olan karar ağacı sınıflandırılması kullanılmıştır.
Bulgular; AIS veri seti incelenerek yazılan üç adet makale incelenmiştir. Gemilerin sağlıklı manevra varsayımları için korelasyon matrisi ile gemilerin seyir esnasında drift oranları karşılaştırılmıştır. Aynı rotada seyreden gemiler son olarak bir veri setinde birleştirilerek hareket rotaları üzerinden sınıflandırmaya gidilmiştir.
2. KARAR AĞACI
Karar Ağacı sınıflandırma algoritması, veri miktarı, algoritmanın etkinliği ve mevcut belleğe göre seri veya paralel adımlarla yapılabilir. Seri ağaç, bir eğitim veri kümesi kullanılarak oluşturulan ikili ağaç olarak mantıksal bir modeldir. Kural değişkenleri kullanarak bir hedef değişkenin değerini tahmin etmeye yardımcı olur [7]. Hiyerarşik olarak düzenlenmiş kural kümelerinden oluşur. Gelecekteki bir örneğin mevcut önceden tanımlanmış sınıflarda sınıflandırıldığı ve gözlemleri birbirini dışlayan alt gruplara bölmeye çalıştığı bir karar prosedürünü temsil etmek için düz, yinelemeli bir yapıdır. Ağaçtaki her bölüm, orijinal veri kümesindeki bir veya daha fazla kayda karşılık gelir. En üstteki düğümler, kök düğüm ve verilen veri kümesindeki tüm satırları temsil eder [8].
Her bir düğüm, alt gruplar benzer anlamlı bölünmeye girmek için çok küçük olana veya daha fazla bölünerek istatistiksel olarak önemli hiçbir alt grup üretilmeyene kadar alt düğümler üretir. Örneklemin bazı bölümleri büyük bir ağaçla sonuçlanabilir ve bazı bağlantılar aykırı değerler veya yanlış değerler verebilir. Bu tür dalların kaldırılması gerekir. Ağaç budama, modelin doğruluk oranını önemli ölçüde etkilemeyecek şekilde yapılmalıdır.
3.LİTERATÜR TARAMASI
AIS verilerinin veri madenciliğinde kullanmasını araştıran 3 makale bulunmuş ve incelenmiştir.
| Makale İsmi | Yazarlar | Üniversite | Kullanılan Metod |
|---|---|---|---|
| Vessel track information mining using AIS data | Feng Deng, Sitong Guo ,Yong Deng , HanyueChu,Qingmeng Zhu and Fuchun Sun | University of Chinese Academy of Sciences | Fp-Growth Algoritması ve Markov modeli |
| Ship Traffic Flow Prediction Based on AIS Data Mining | Jiadong LI,Xueqi LI,Lijuan YU | Wuhan University of Technology Wuhan | Kübik Spline İnterpolasyonu ve RBF Sinir Ağı Modeli |
| AIS Database for Maritime Trajectory Prediction and DataMining | Shangbo Mao, Enmei Tu, Guanghao Zhang, Lily Rachmawati, Eshan Rajabally, Guang-Bin Huang | Nanyang Technological University Singapore | Extreme Learning Machine (ELM) |
3.1. Vessel track information mining using AIS data
Ekonomi geliştikçe, su yolu taşımacılığının ve Uluslararası Ticaretin artması deniz trafiğinin yükselmesine neden olur. Çin ile ilgili uluslararası ticaretin %90’ından fazlasının deniz yoluyla gerçekleştirildiği düşünüldüğünde, Çin için nakliye analizi ve denizcilik gözetimi büyük önem taşımaktadır. Geleneksel olarak, geminin izini sürmek ve deniz durumunun tespiti radar, kızılötesi vb. Ekipmanlarla yapılmaktadır. Günümüzde teknolojinin gelişmesiyle birlikte, geminin izini sürmek ve denizi gözetlemek için kendi kendini raporlama sistemi devreye girmiştir. En yaygın olarak uygulanan kendi kendini raporlama sistemi, Uluslararası Denizcilik Örgütü ve Denizde Can Güvenliği Uluslararası Sözleşmesi (SOLAS) tarafından sunulan Otomatik Tanımlama Sistemidir. Kargo gemileri, konteyner gemileri gibi sivil gemilerin çoğu, AIS cihazları ile donatılması zorunludur. Otomatik Tanımlama Sisteminin yaygın olarak uygulanmasıyla, büyük AIS verileri oluşturulur. AIS verilerinin enlem, boylam gibi özelliklerini analiz ederek ,rotanın hareket modellerini çıkarabilir, hareket durumunu tahmin edebilir ve anormal hareket durumunun tespitini yapabilir.
3.2. Ship Traffic Flow Prediction Based on AIS Data Mining
Bu makale, büyük AIS verilerinin anormal olup olmadığını belirler, gürültü azaltma çalışmasını tamamlar ve kayıp verilerin yeniden yapılandırılmasını sağlamak için kübik spline enterpolasyonunu kullanır. Temiz veri elde etme temelinde, geminin gözlem yüzeyine gelişinin düzenini saymak için bir ayırt edici fonksiyon oluşturulur, ve daha sonra, belirli bir günde farklı zaman dilimlerinde gözlem bölümünden geçen gemi trafik akışını modellemek için bir zaman serisi yöntemi kullanılır. Simülasyon deneyi, RBF sinir ağı modeliyle kapsamlı karşılaştırma yoluyla tahmin sonucunun rasyonelliğini doğrular ve denizcilik departmanının iyileştirilmiş yönetimi uygulaması için bir referans sağlar.
3.3. AIS DatabaseforMaritimeTrajectoryPrediction and DataMining
Otomatik Tanımlama Sistemi (AIS), gemideki alıcı-verici ve karasal ve / veya uydu baz istasyonlarının hareketini izler. AIS tarafından toplanan veriler, yayın kinematik bilgilerini ve statik bilgileri içerir. Her ikisi de denizcilik istihbaratında anahtar teknikler olan deniz anomalisi tespiti ve gemi rotası tahmini için kullanışlıdır. Bu makale, denizde yörünge öğrenme, tahmin ve veri madenciliği için standart bir AIS veri tabanı oluşturmaya ayrılmıştır. Extreme Learning Machine (ELM) tabanlı bir yol tahmin yöntemi bu AIS veri tabanında test edilmiştir ve test sonuçları, bu veri tabanının farklı yörünge tahmin algoritmaları ve diğer AIS veri tabanlı madencilik uygulamaları için standartlaştırılmış bir eğitim kaynağı olarak kullanılabileceğini göstermektedir.
4.İNCELENEN MAKALELERDE UYGULANAN YÖNTEMLER
4 .1. FP-Growth algoritması
FP-Growth algoritması iki aşamadan oluşur: FP Ağacı’nın yapımı ve FP Ağacı’ndan sık kullanılan kalıpların çıkarılması. FP-Ağacı’nın yapısı veritabanı üzerinde iki tarama gerektirir. İlk tarama, F listesinin oluşturulması için daha sonra azalan sıraya göre sıralanan sık öğeleri seçer. İkinci tarama, FP-Ağacı’ nı oluşturur. Öncelikle, işlemler sık olmayan öğeler kaldırılarak F listesine göre yeniden sıralanır. Ardından yeniden düzenlenen işlemler FP Ağacı’na eklenir. FP-Growth girişi, FP-Ağacı ve minimum destek sayısıdır. FP-Growth, FP-Ağacı’ndaki düğümleri F listesinde en az bulunan öğeden ayırır. Her bir düğümü ziyaret ederken, FP-Growth, yoldaki öğeleri düğümden ağacın köküne toplar. Bu öğeler, o maddenin koşullu kalıp tabanını oluşturur. Koşullu kalıp tabanı, öğe ile birlikte meydana gelen küçük bir desen veritabanıdır. Sonra FP-Growth oluşturulur. Koşullu desen tabanından küçük FP-Ağacı ve FP Ağacı üzerinde FP-Growth yürütülür. Koşullu desen tabanı oluşturulmadan işlem tekrarlamalı olarak yinelenir [1].
4.2. Markov Karar Süreci
Markov süreci, şu anda meydana gelen bir olayın gelecekteki durumu hakkında olasılıklı bilgiler edinmeyi sağlayan bir yöntemdir. Markov analizinde önceki durumlardan bağımsız olarak, yalnızca mevcut duruma bağlı olan sürecin, nasıl gelişeceğini içeren olasılıkları bulunduran bir özelliği bulunmaktadır [2]. Süreçlerin çoğu uygulamada bu tanıma uymakta ve dolayısıyla da bu süreçlere Markov analizi olasılık modeli uygulanabilmektedir. Markov süreci uygulamalarında, optimal bir sonuca ulaşmak yerine karar vermeye yardımcı olabilecek olasılıklı bilgiler sağlama amacı güdülür.
4.2.1. Saklı Markov Modeli
Markov zinciri modellerinde sistemin, bir durumdan diğer duruma geçişi söz konusudur. Sistemin bulunabileceği bu durumlar ve durumlar arası geçişler açık bir şekilde gözlemlenebilir durumda ise Markov zinciri söz konusudur. Saklı Markov Modelinde ise durumlar dışarıdan doğrudan gözlemlenemez, yalnızca her bir durumdan meydana gelen gözlem çıktıları gözlemlenebilir [3]. Gözlem çıktılarının bir araya gelmesi ile gözlem dizisi meydana gelmektedir.
4.3. Kübik Spline İnterpolasyonu
Kübik spline interpolasyonu: (xk, yk) (k = 0(1)N) noktaları verildiğinde bu noktalardan geçen eğriyi bulma işlemidir.[4]
4.4. RBF
Radyal temelli Fonksiyonlar (RBF) Radyal temelli fonksiyon ağı tasarımı ise çok boyutlu uzayda eğri uydurma yaklaşımıdır ve bu nedenle RBF’nin eğitimi, çok boyutlu uzayda eğitim verilerine en uygun bir yüzeyi bulma problemine dönüşür. Radyal Tabanlı Yapay Sinir Ağları (RTYSA), biyolojik sinir hücrelerinde görülen etkitepki davranışlarından esinlenilerek 1988 yılında geliştirilmiş ve filtreleme problemine uygulanarak YSA tarihine girmiştir. RTYSA modellerinin eğitimini çok boyutlu uzayda eğri uydurma yaklaşımı olarak görmek mümkündür.[5]
4.5. Extreme Learning Machine
Extreme learning machine (ELM), tek gizli katman ileri beslemeli sinir ağları için yeni bir öğrenme algoritmasıdır. Geleneksel sinir ağı öğrenme algoritması ile karşılaştırıldığında, yavaş eğitim hızının ve aşırı uyum sorunlarının üstesinden gelir.[6] ELM, ampirik risk minimizasyon teorisine dayanmaktadır ve öğrenme süreci sadece tek bir yineleme gerektirir. Algoritma, birden çok yinelemeyi ve yerel en aza indirmeyi önler.
5. AIS
Modern küreselleşmiş ekonomide, okyanus taşımacılığı, malların uzun mesafelerde taşınması için en verimli yöntem haline geliyor. Dünya ekonomisinin sürekli büyümesi, daha büyük gemi kapasitesi ve daha yüksek seyir hızı ile artan deniz taşımacılığı talebine yol açmaktadır. Bu durumda, güvenlik ve emniyet, deniz taşımacılığında kilit konular haline gelir. Otomatik Tanımlama Sistemi (AIS) verilerini kullanan akıllı deniz seyrüsefer sistemi, geleneksel deniz seyrüsefer sistemine kıyasla daha az maliyetle deniz güvenliğini artırır. AIS, Uluslararası Denizcilik Örgütü (IMO) tarafından uygulanan bir deniz güvenliği ve gemi trafik sistemidir. Otonom olarak yayınlanan AIS mesajları kinematik bilgileri (gemi konumu, hızı, yönü, dönüş oranı, varış yeri ve tahmini varış zamanı dahil) ve statik bilgileri (gemi adı, gemi MMSI kimliği, gemi tipi, gemi boyutu ve güncel saat dahil) içerir. Gemi yolu tahmini ve çatışmadan kaçınma gibi akıllı deniz trafiği manipülasyonları için yararlı bilgilere dönüştürülebilir ve böylece gelecekteki otonom deniz seyrüsefer sisteminde merkezi bir rol oynar. Son birkaç yıldır, gemilerden ve kıyı istasyonlarından AIS mesajları almak giderek daha sıradan hale gelmektedir.
5.1. AIS Veri Tabanı Yapısı
Bu bölüm, veri işleme aracını ve önerdiğimiz standart AIS veri tabanını oluşturmanın ayrıntılarını açıklamaktadır. Tüm süreç dört bölümden oluşur:
- Ham veri ön işleme.
- Ham veri seçimi.
- Aday veri temizleme.
- Eksik veri enterpolasyonu.
5.1.1. Ham Veri Ön İşleme
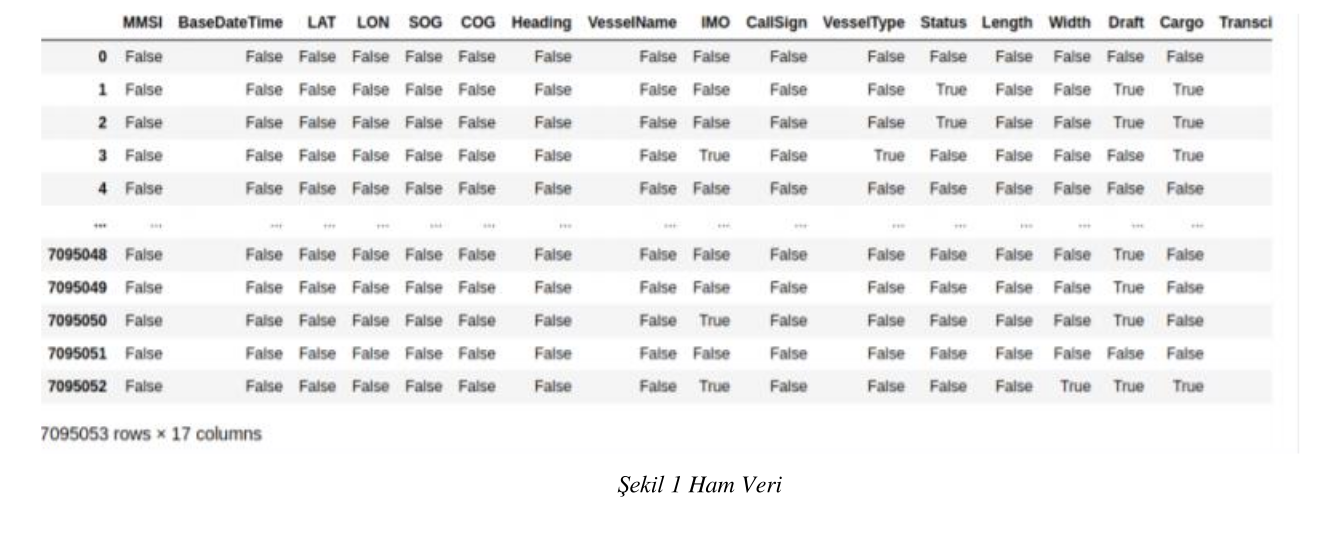
Bir AIS veri tabanı oluşturmanın ilk adımı, ham veri tabanı dosyasını csv formatında http://www.marinecadastre.gov/ais/ adresinden indirmektir. AIS verilerini önceden işlemek ve faydalı verileri seçmek için, csv format dosyası tablo veri kayıtlarının satırlarından oluştuğundan, pandas kütüphanesi kullanılmıştır. Yapılan işlemlerini kayıt altına alabilmek için çeşitli programlama dilleri için etkileşimli bir ortam sağlayan açık kaynak kodlu bir program olan Jupyter Notebook, kullanılmıştır. Şekil-1 de ais bilgilerinin işlenmemiş hali görülmektedir.
Şekil 1 Ham Veri
5.1.2. Ham Veri Seçimi
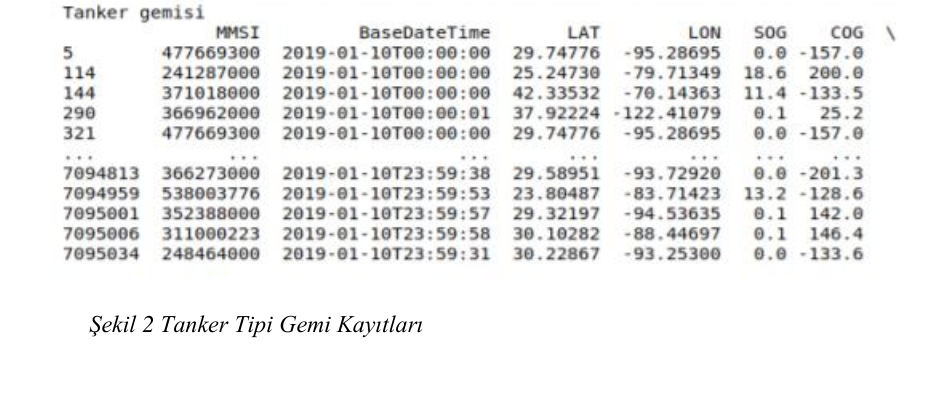
Gemiler öncelikle şekil-2 de örnek (tanker gemisi) gösterimi yapıldığı üzere gemi tiplerine göre sıralandırılmıştır, ardından şekil-3 de gösterildiği üzere MMSI ile tekrar sıralanırmıştır. Bu sayede gemi tiplerine göre gemi mevcut sayılarına ulaşılmıştır. Bir MMSI, tek bir gemiyi temsil eder. Böylelikle her bir geminin izi kronolojik sırada görüntülenebilir ve işlenmesi daha kolay olur.
5.1.3. Aday Veri Temizleme
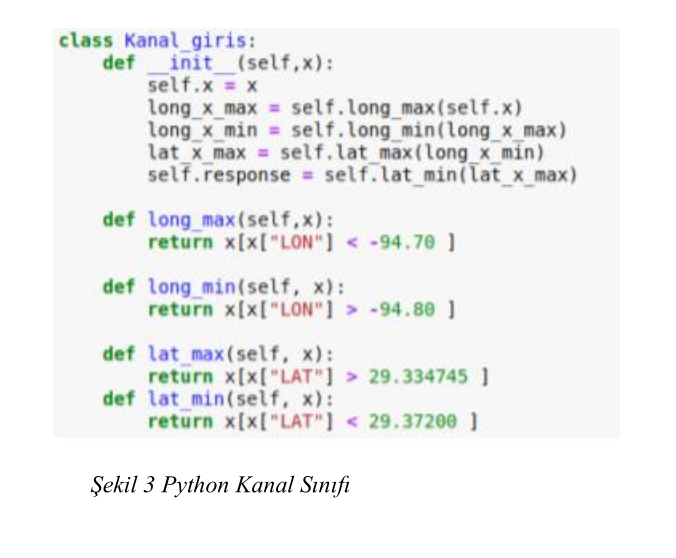
Gemi tipleri belirlendikten sonra geminin hareket durumuna göre sıralama işlemi yapılır. Bu sayede hareket halindeki verilerine ulaşılır. Gemilerin tipleri ve hareket durumlarına göre filtrelendikten sonra hareketlerinin sağlıklı analiz edilebilmesi ve karşılaştırılması için başlangıç noktaları filtrelenmektedir. Şekil-3 de kanal girişini veri setinden çekmek için yazılan python sınıfı görülmektedir.
Şekil 2 Tanker Tipi Gemi Kayıtları
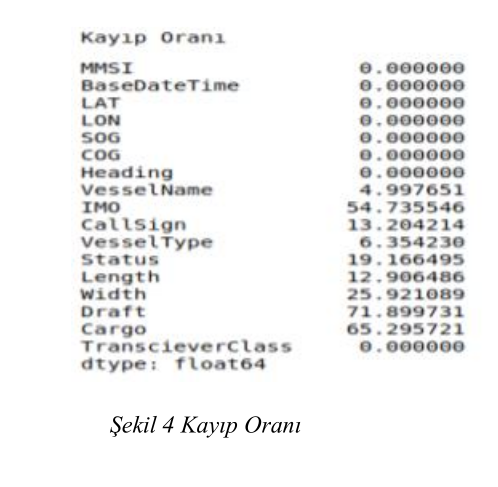
5.1.4. Eksik Değer Enterpolasyonu
AIS veri dosyamızda veri eksikliklerine neden olan süreksizlik, öğrenme algoritmalarının performansını ve veri tabanının veri madenciliği kalitesini etkileyebilir. Ayrıca ham veriler, hatalı hız verileri de içerir. Şekil-4 de veri setindeki boş veya anlamsız sütunların toplam veriye olan oranı bulunmuştur. Enterpolasyon yapmadan önce hatalı veriler silinmiştir.
6. Veri Setine Uygulanan Temizleme İşlemi
6.1. Tanımsız Verilerin Silinmesi
Veri setinin üzerindeki NaN, boşluk, NULL, undefined değerleri veri setinden çıkartılmıştır.
6.2. Merkezi Değer uygulaması
Merkezi değer atama , eksik değerlerin kendi merkezi eğilim ölçümleri, yani Ortalama , Medyan , Mod ile değiştirildiği bir yöntemdir. Ortalama veya Medyan kullanan sayısal değişkenler için tercih edilirken kategorik değişkenler için Mod kullanılır. Bunun arkasındaki sebep, kategorik değişkenler için ortalama ve medyanın bir anlamı olmamasıdır, çünkü kategorik değişkenlerin nicel özelliklerden ziyade nitel özellikleri vardır. Bu nedenle, merkezi eğilimi hesaba katmak için, Modu en sık ortaya çıkan değer olduğu için kullanırız.
Şekil 3 Python Kanal Sınıfı
Şekil 4 Kayıp Oranı
7. DENEYSEL ÇALIŞMA
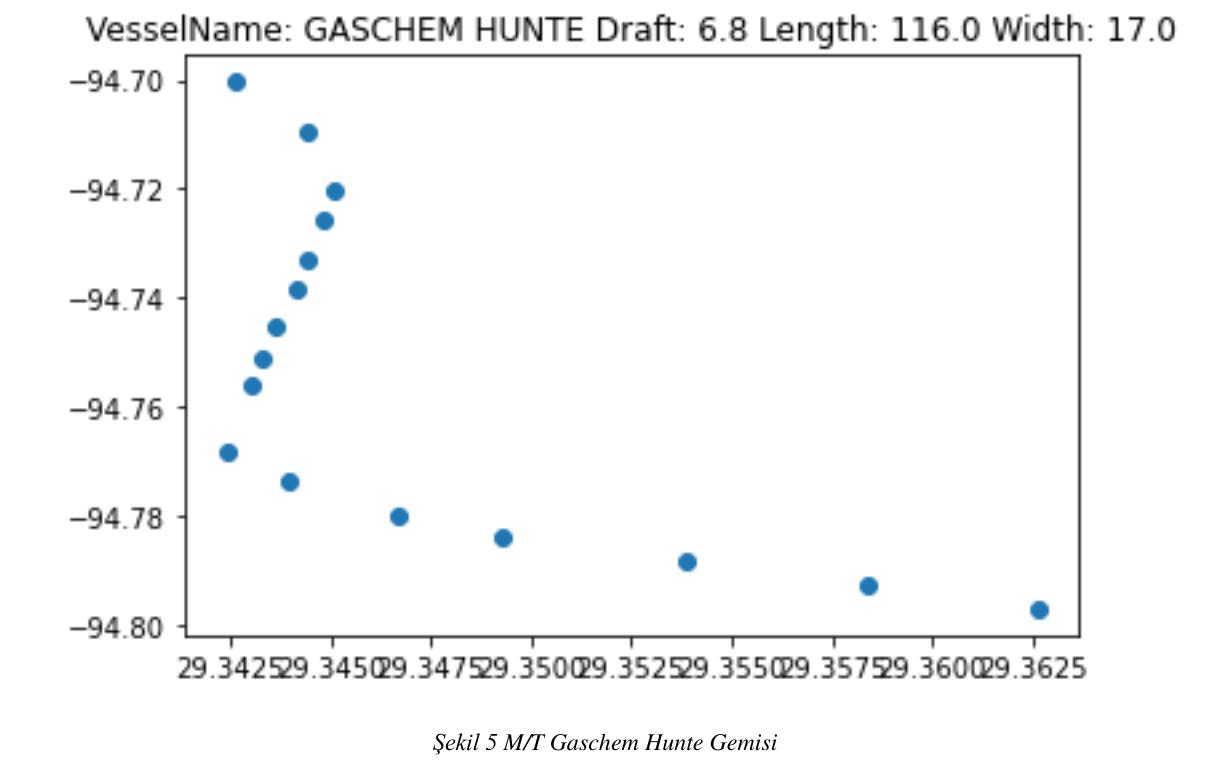
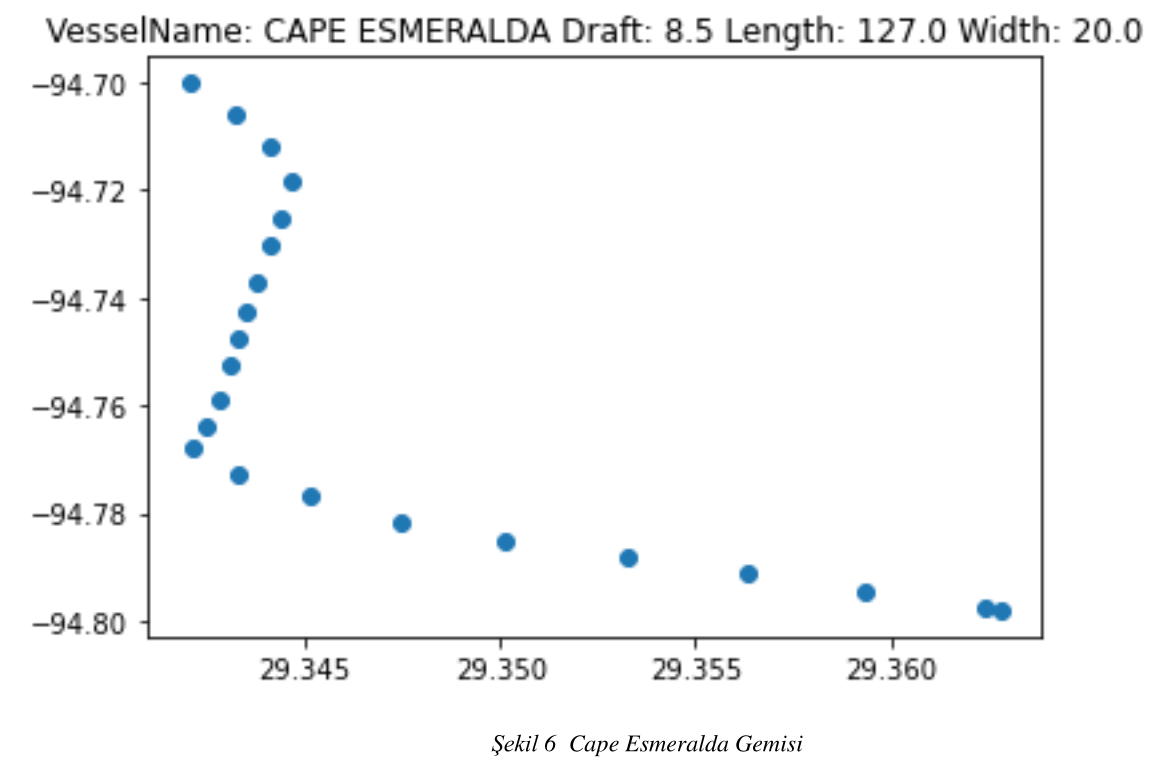
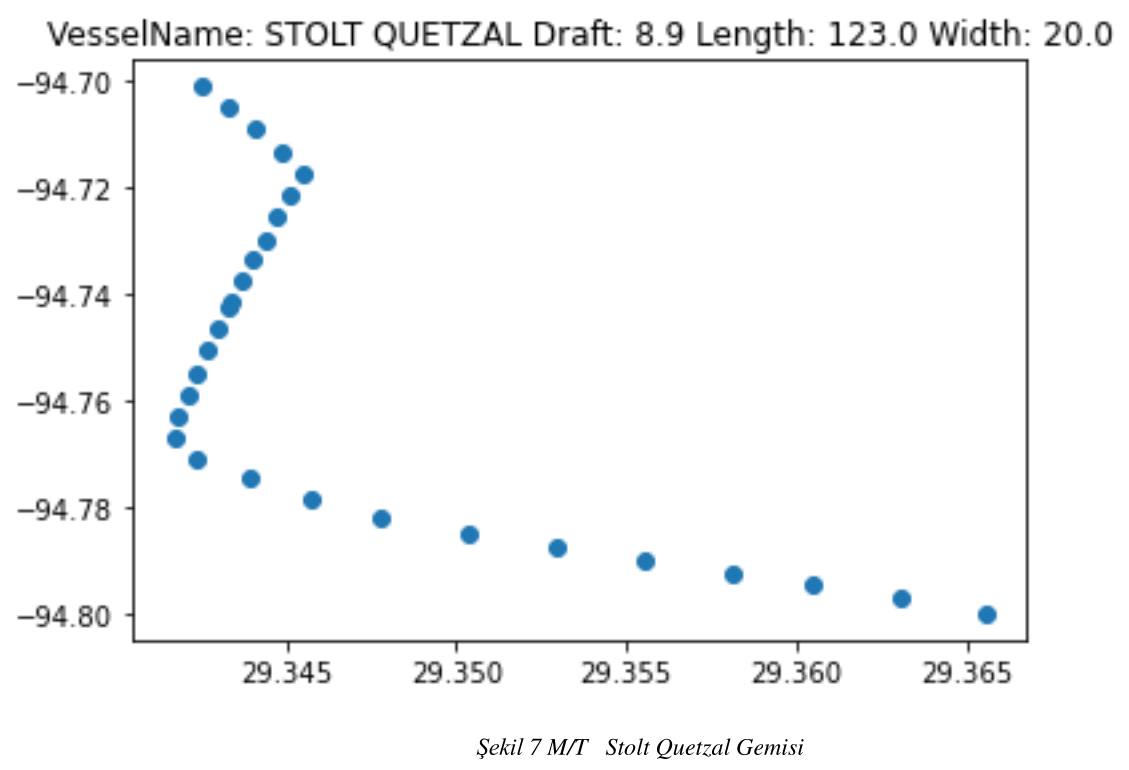
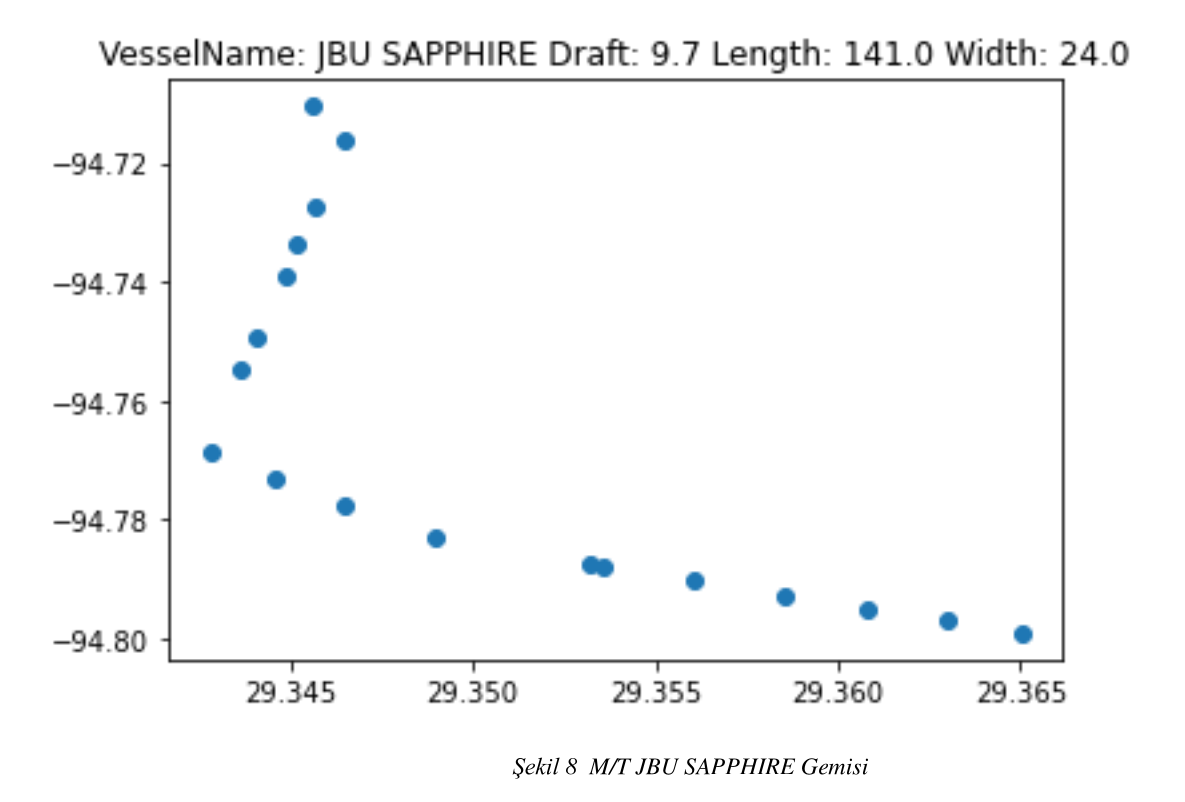
Kapsam kısmında bahsettiğimiz verileri pandas kütüphanesi yardımı ile önce gürültülü ve işlemimize olacak tanımsız değerlerden arındırdık. Veri setimizi sadece tanker ve kargo gemileri olacak şekilde ayrıştırdık. Ayrıştırdığımız bu veri setlerini Status Durumu 0 değeri olan gemiler şeklinde tekrar ayrıştırdık. Bu veri setini ise belirlediğimiz liman sınırları içerinde tekrar ayrıştırıp veri setini birleştirdik. Birleştirdiğimiz veri setini tekrar draft ve gemi boylarına göre ayrıştırdık. Veri setinde bulunan her bir tanker ve kargo gemilerinin çizdiği rotayı oluşturduk. Oluşturduğumuz bu rotaları benzerliklerine göre ayrıştırdık ve aynı rota iz düşümü olan gemileri karar ağacı ile sınıflandırmaya çalıştık. Rotaları benzer olan tanker tipi gemiler özellikleri şeklin üst tarafında olacak şekilde; şekil- 5 , şekil- 6 , şekil- 7 , şekil- 8 , olarak tanımlanmıştır.
Şekil 5 M/T Gaschem Hunte Gemisi
Şekil 6 Cape Esmeralda Gemisi
Şekil 7 M/T Stolt Quetzal Gemisi
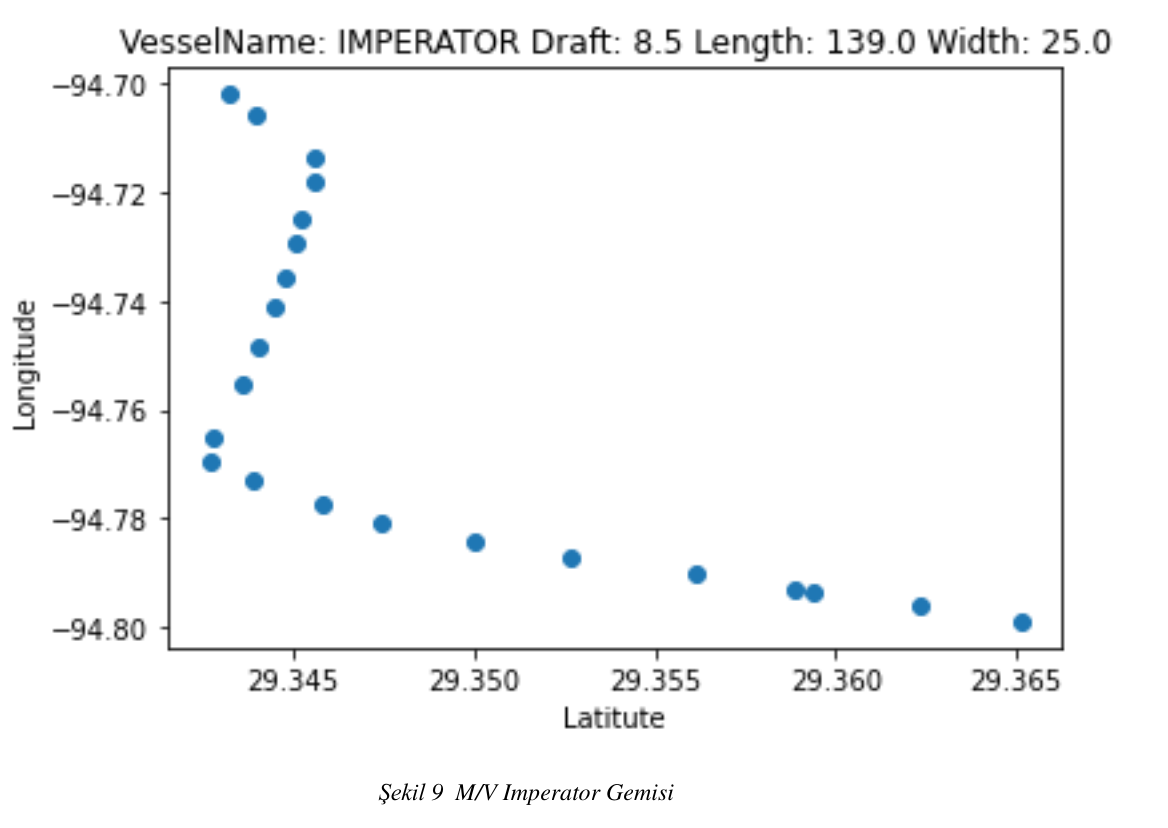
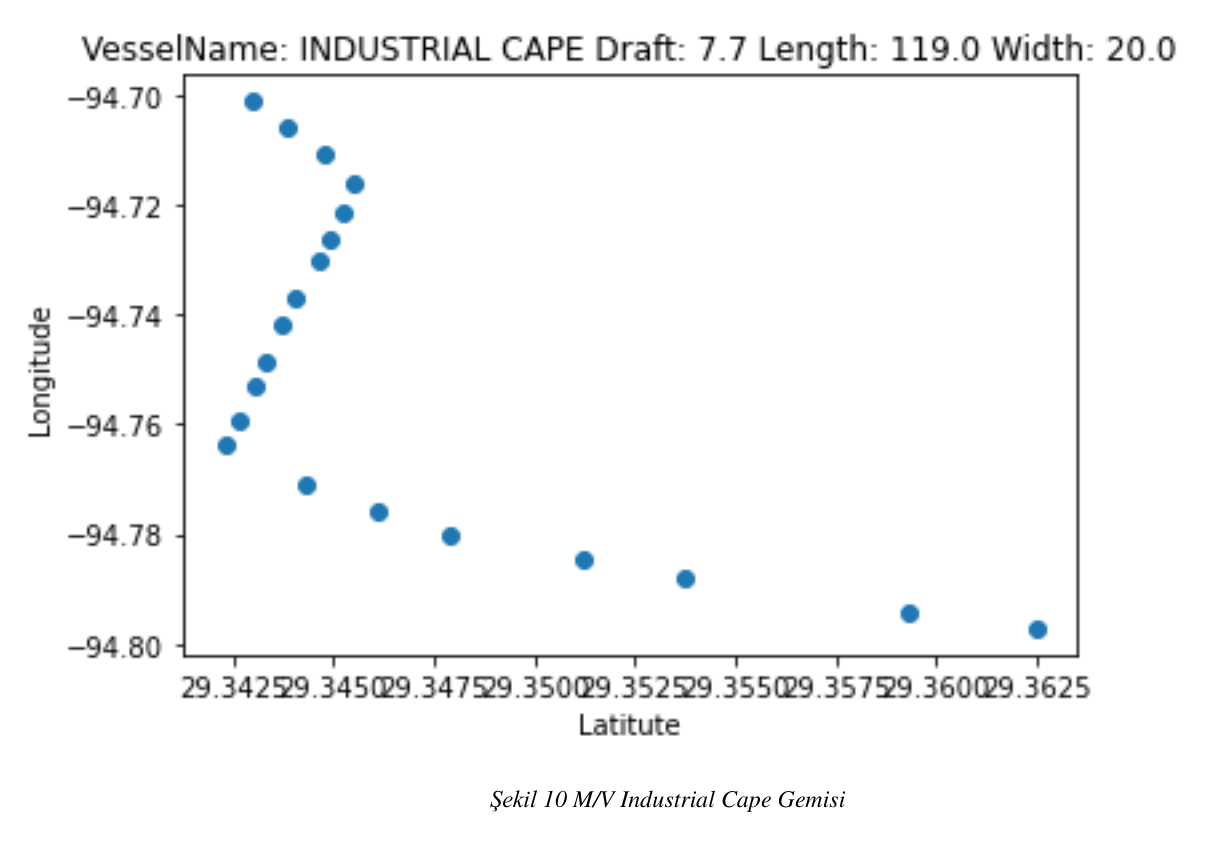
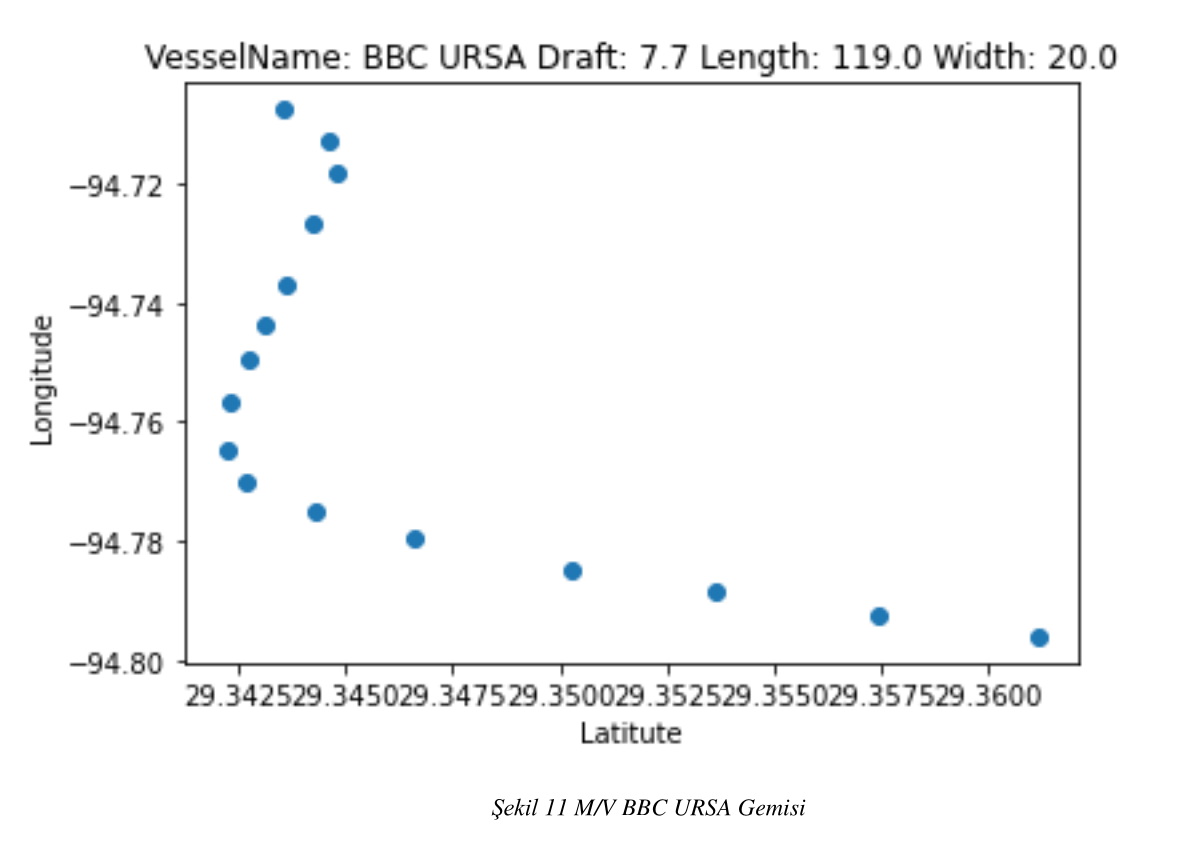
Rotaları benzer olan kargo tipi gemiler özellikleri şeklin üst tarafında olacak şekilde; şekil- 5 , şekil- 6 , şekil- 7 , şekil- 8 , olarak tanımlanmıştır.
Şekil 8 M/T JBU SAPPHIRE Gemisi
Şekil 9 M/V Imperator Gemisi
Şekil 10 M/V Industrial Cape Gemisi
 Şekil 11 M/V BBC URSA Gemisi
Şekil 11 M/V BBC URSA Gemisi
7.1. Rota Metodu
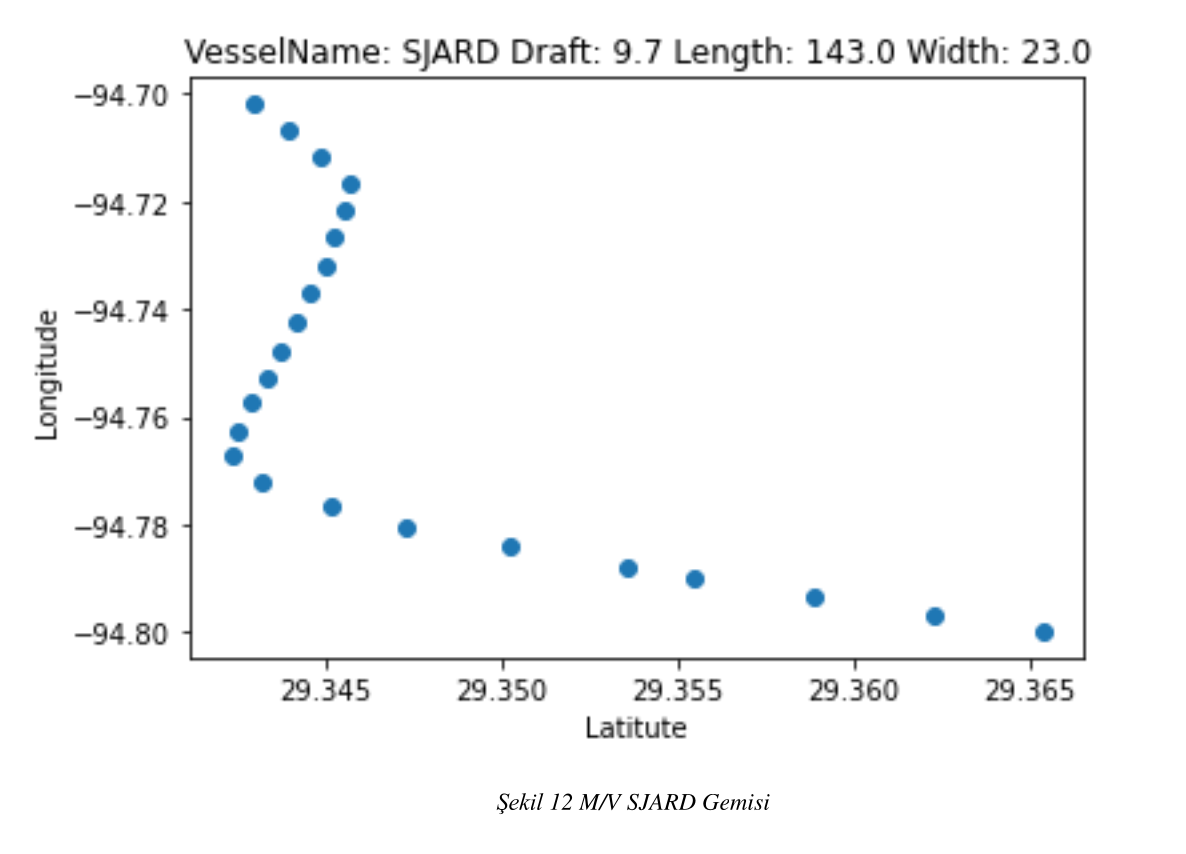
Aşağıdaki şekilde görüldüğü gibi tüm kargo gemileri “data_tanker_name” kargo isimleri ile ayrıştırılarak değişkenlere atanacaktır. Bu değişken ship değişkeninin üzerine yazıldıktan sonra her bir geminin gemi ismi, draft bilgisi, gemi uzunluğu ve gemi eni bilgilerini de içeren rota iz düşümü haritası oluşturulacaktır. Aşağıda rotaları çizmede kullandığımız metodu görmektesiziniz.
l = locals()
global ship
for cargo_name in uni_vessel_name(cargo_x_y):
print(cargo_name)
l['data_'+str(cargo_name)]= cargo_x_y[cargo_x_y['VesselName'] == cargo_name]
ship = l['data_'+str(tanker_name)]
plt.title('VesselName: '+ cargo_name+ ' ' +'Draft: '+str(ship['Draft'][0:1].max())+' ' +'Length:
'+str(ship['Length'][0:1].max())+ ' '+'Width: '+str(ship['Width'][0:1].max()))
plt.xlabel('Latitute')
plt.ylabel('Longitude')
plt.scatter(x=ship['LAT'], y=ship['LON'])
plt.show()
Belirlenen liman limitleri, belirlenen 100 metreden büyük 150 metreden küçük maksimum su çekimi 9.8 metre ile 6. metre arasında olan ve üzerinde yol bulunan tanker gemilerinin rota iz düşümleri aşağıda görülmektedir.
7.2. Farklı Rotalar Seyreden Gemileri Temizleme İşlemi
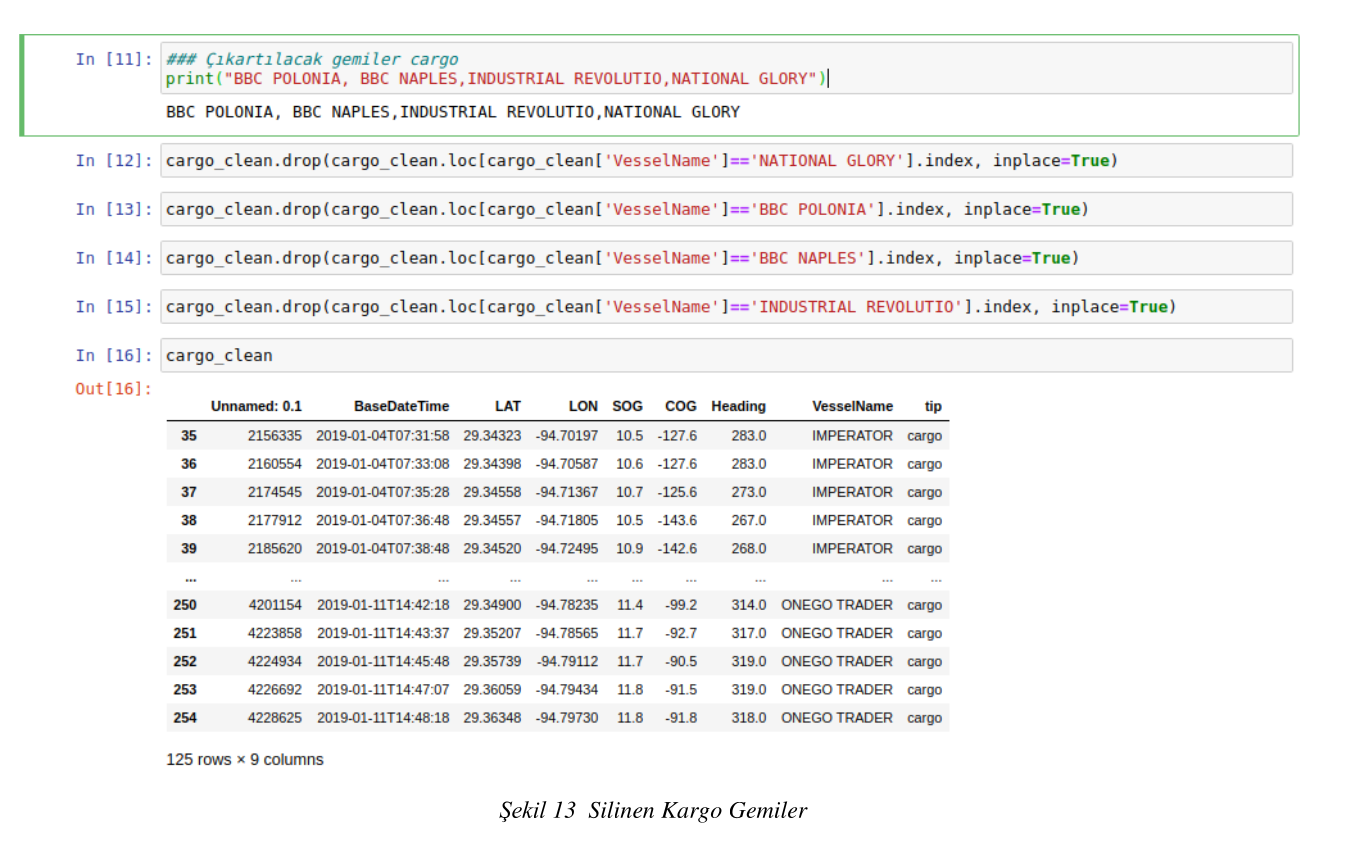
Mevcut veri setimizden rota iz düşümleri uyuşmayan gemiler veri setinden silinmiştir. Şekil- 13 de örnek olarak kargo gemileri veri setinden silinmiştir.
Şekil 12 M/V SJARD Gemisi
Şekil 13 Silinen Kargo Gemiler
Şekil-14 de silinen tanker gemileri gösterilmektedir.

7.3. Verilerin Birleştirilmesi
Oluşturduğumuz ve temizlediğimiz verileri tek bir veri setinin içerisinde birleştirerek eğitim ve test verasetleri oluşturulur. Bu veri setleri ile mevcut algoritmaların doğruluk oranları hesaplanır. Mevcut doğruluk oranı en yüksek karar ağacı sınıflandırması sonucu çıkmıştır. Şekil-15 de test sonucunu görmektesiniz.
Şekil 15 Algoritma Test Sonuçları
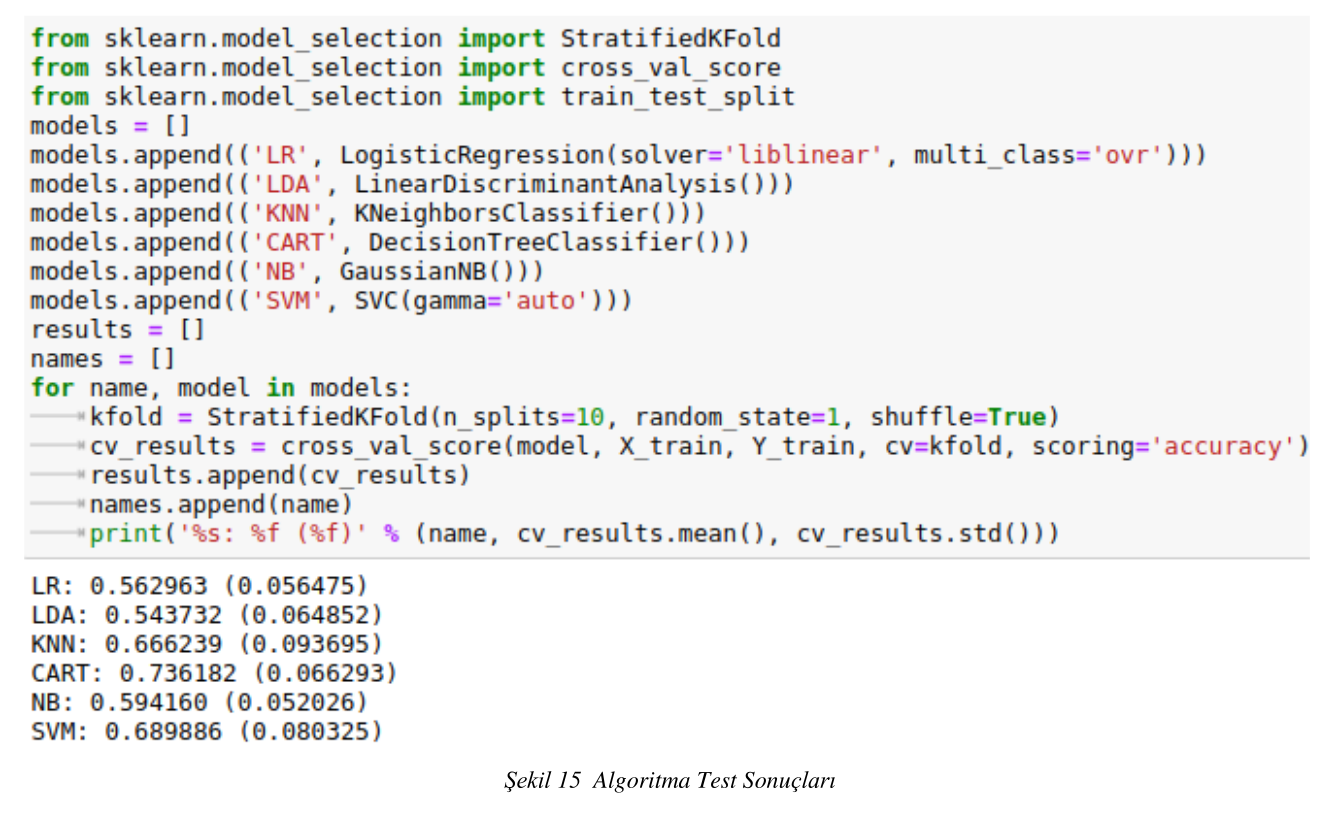
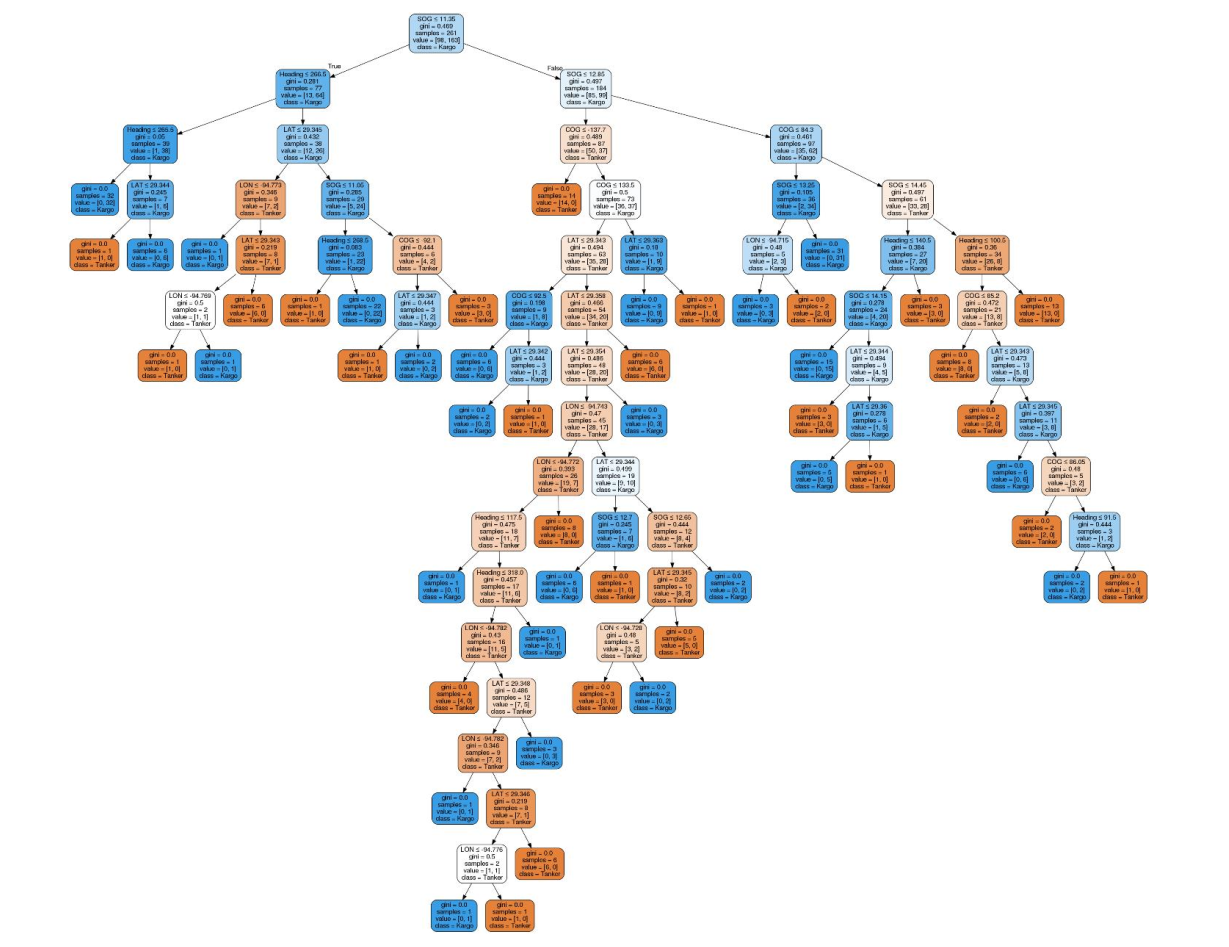
Şekilde görüldüğü üzere karar ağacı sınıflandırması bire en yakın değeri almaktadır. Veri setinde LAT,LONG,SOG ve Heading değerlerinden yararlanılarak bir karar ağacı oluşturulması sonucuna varılmıştır.
8. SONUÇLAR
Veri madenciliği, ofis, hükümetler ve şirketler tarafından belirli amaçlarla eğilimleri tahmin etmek ve oluşturmak için kullanılan bir algoritmalar koleksiyonudur. Farklı yapı ve tiplerdeki gemilerin aynı rota üzerinde giderken oluşturdukları karakteristik özelliklerin karar ağacında yorumlanması için birleştirdiğimiz veri setini daha önce oluşturduğumuz eğitim veri setini kullanarak sınıflandırdık. Aşağıdaki şekilde karar ağacı fonksiyonunu görmektesiniz.
Şekil 16 Karar Ağacı Met odu
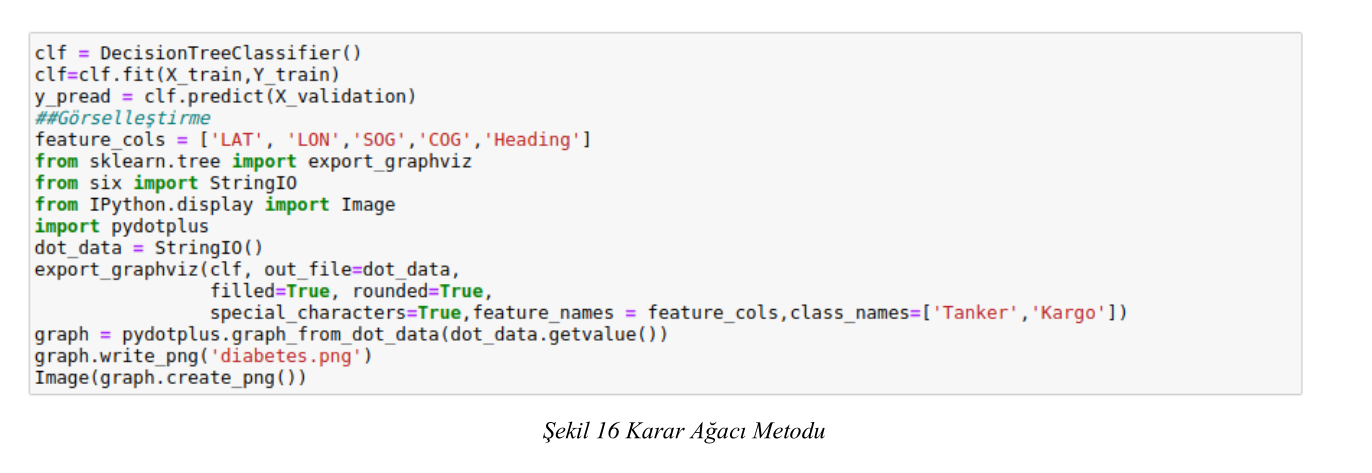
Çıkan sınıflandırmada oluşan ağacın budanarak ayrılan kollardan temizlenmesi gerekmektedir. Ağaç budama karmaşıklığı çıkan sonuçta çok fazladır. Optimum ağaç yapısı oluşturulmaya çalışılırken birden çok zor yapıda ve büyük ağaçlar oluşabilmektedir. Ağaç eğer bir tek veri kaydı kalana kadar büyütülürse, bu durum da birçok soru ve dal oluşturulmuş olmaktadır. Ancak karar ağacını bu denli büyütmek karmaşık ve büyük ağaçların oluşmasına neden olabilmektedir. Maalesef karar ağacını oluşturduktan sonrada gemi tiplerinin manevraya etkisini etkileyecek somut verilere ulaşamadım. Şekil- 17 dide karar ağacı sınıflandırmasını görmektesiniz.
Şekil 17 Karar Ağacı Sınıflandırması Şeması
9. KAYNAKÇA
[1] FP-GROWTH ALGORİTMASI- WEKA UYGULAMASI, Öğr. Gör. Serpil SEVİMLİ DENİZ, Van
Yüzüncü Yıl Üniversitesi
[2] MARKOV ZİNCİRLERİ İLE PAZAR PAYI ARAŞTIRMA MODELİ VE OTOMOBİL LASTİĞİ PAZARINDA BİR
UYGULAMA, Yavuz SOYKAN
[3] Saklı Markov Modeli Kullanılarak İstanbul’daki Üniversite Öğrencilerinin GSM Operatör
Tercihlerini Etkileyen Faktörlerin Analizi, Osman AYAZ1, Selçuk ALP, 1 Yıldız Teknik Üniversitesi,
Makine Fakültesi, Endüstri Mühendisliği Bölümü 2018
[4] CEBİRSEL KATSAYILI DİFERANSİYEL DENKLEMLERİN SPLİNE FONKSİYONU İLE ÇÖZÜMÜ Seval ÇATAL, DEU Fen Bilimleri Dergisi
[5] Radyal Tabanlı Yapay Sinir Ağları ile Kemer Barajı Aylık Akımlarının Modellenmesi, Umut OKKAN, H.Yıldırım DALKILIÇ, İMO Teknik Dergi, 2012 5957-5966, Yazı 379
[6] Extreme learning machine: algorithm, theory and applications, Shifei Ding•Xinzheng Xu•Ru Nic, Neural Comput,
[7] N. Rahpeymai, Data Mining with Decision Trees in the Gene Logic Database: A Breast Cancer Study: Institutionen för datavetenskap, 2002.
[8] Popular Decision Tree Algorithms of Data Mining Techniques: A Review, Abbas Alharan,Radhwan Alsagheer, 2017
Yapılan Çalışmanın Aşama Videoları